Sur les problèmes de Zermelo 2D du point de vue du contrôle optimal
Séminaire Analyse et Dynamique, Laboratoire Jean Alexandre Dieudonné, Université Côte d’Azur
2024-10-12
Exemple historique : référence
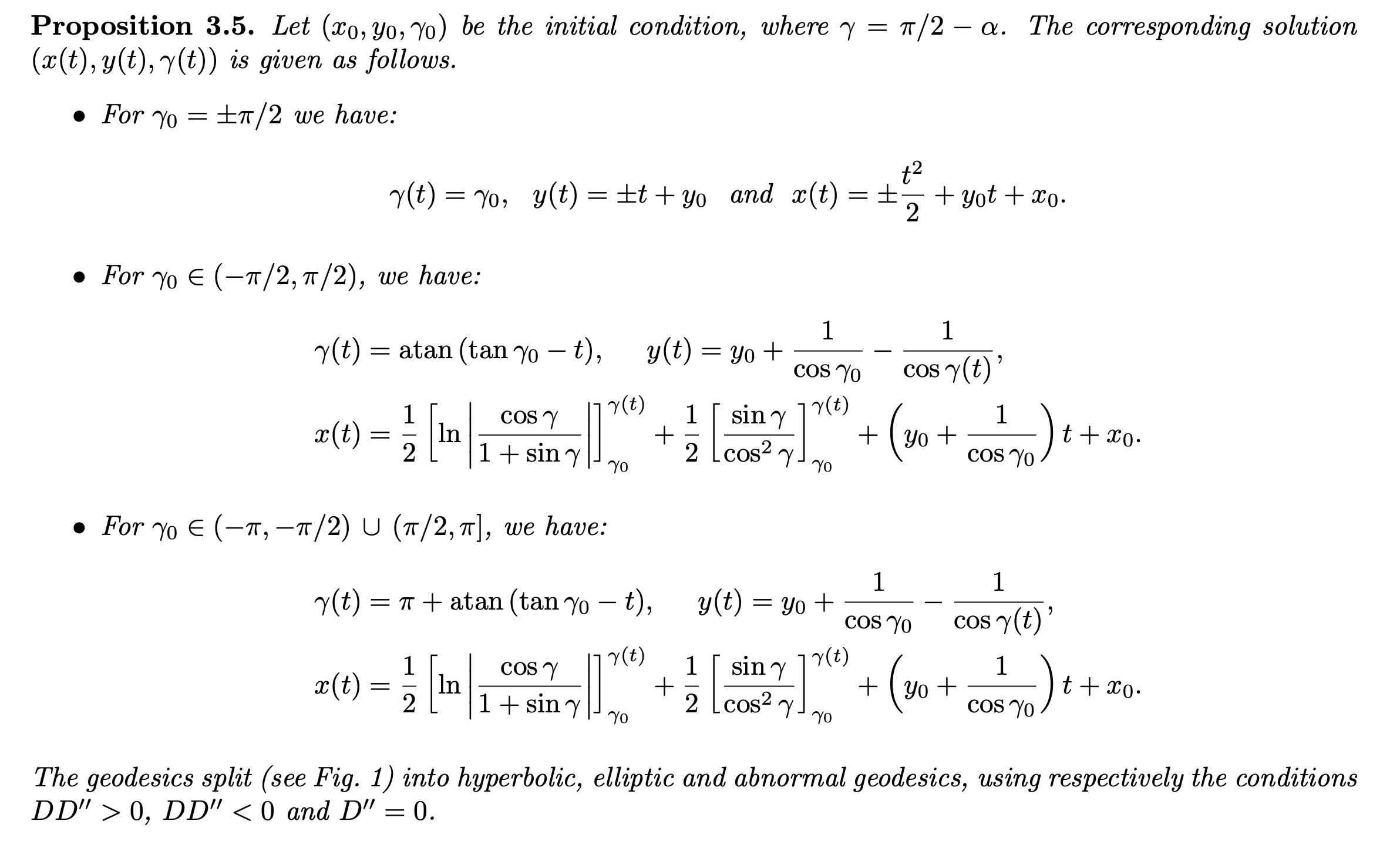
Exemple historique : paramétrisation
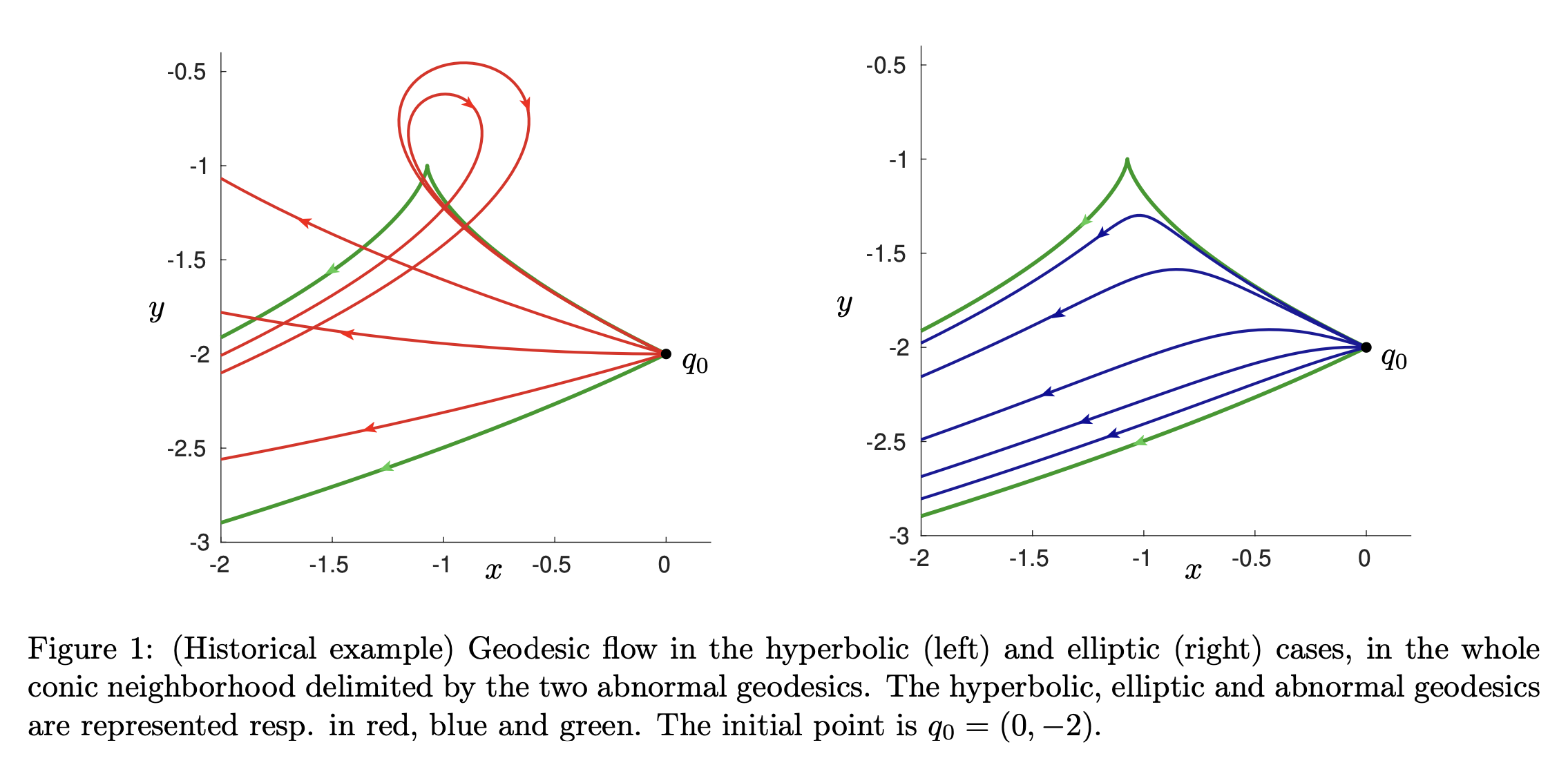
Exemple historique : trajectoires
Problème vortex : référence
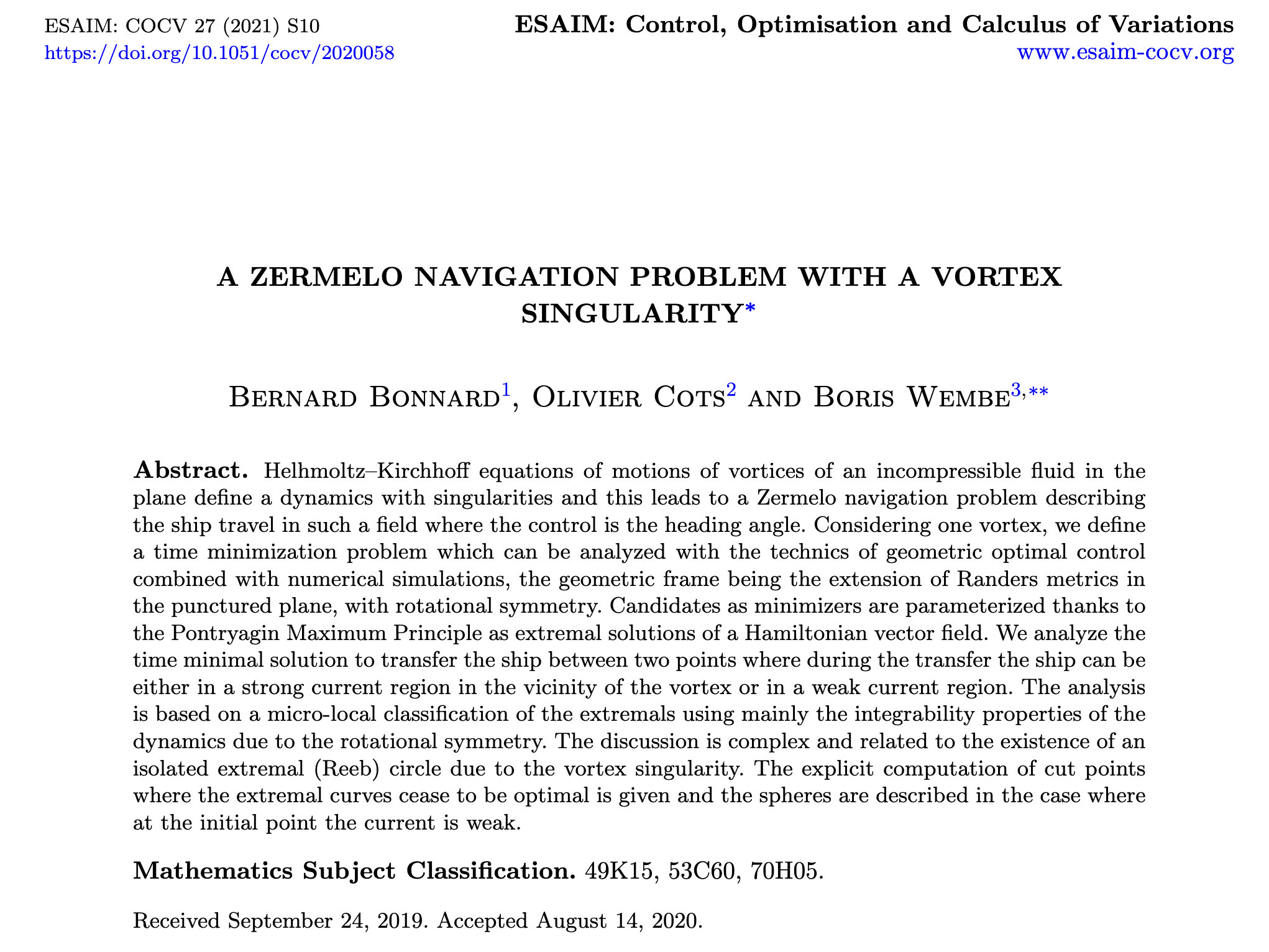
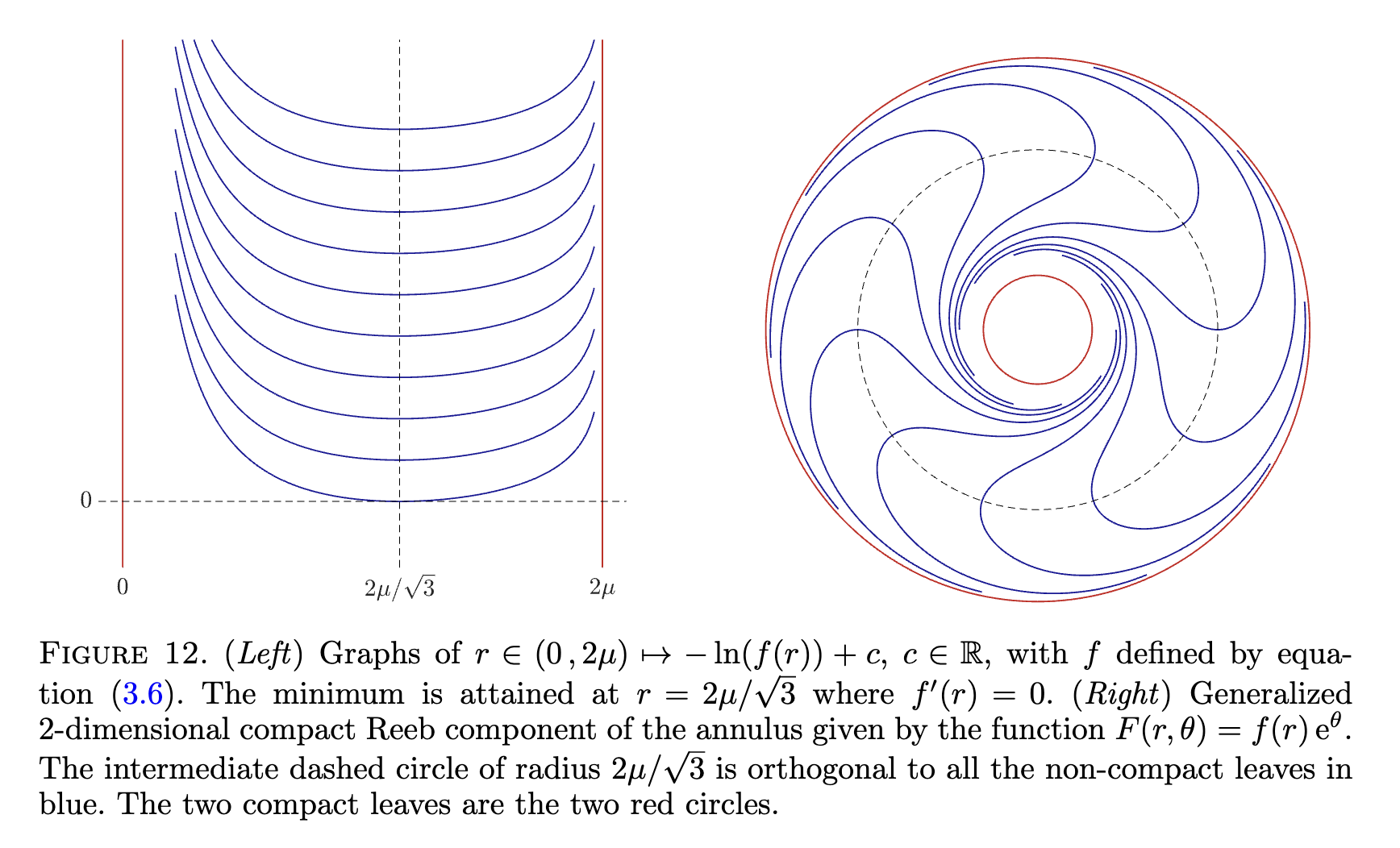
Problème vortex : composantes de Reeb 1/3
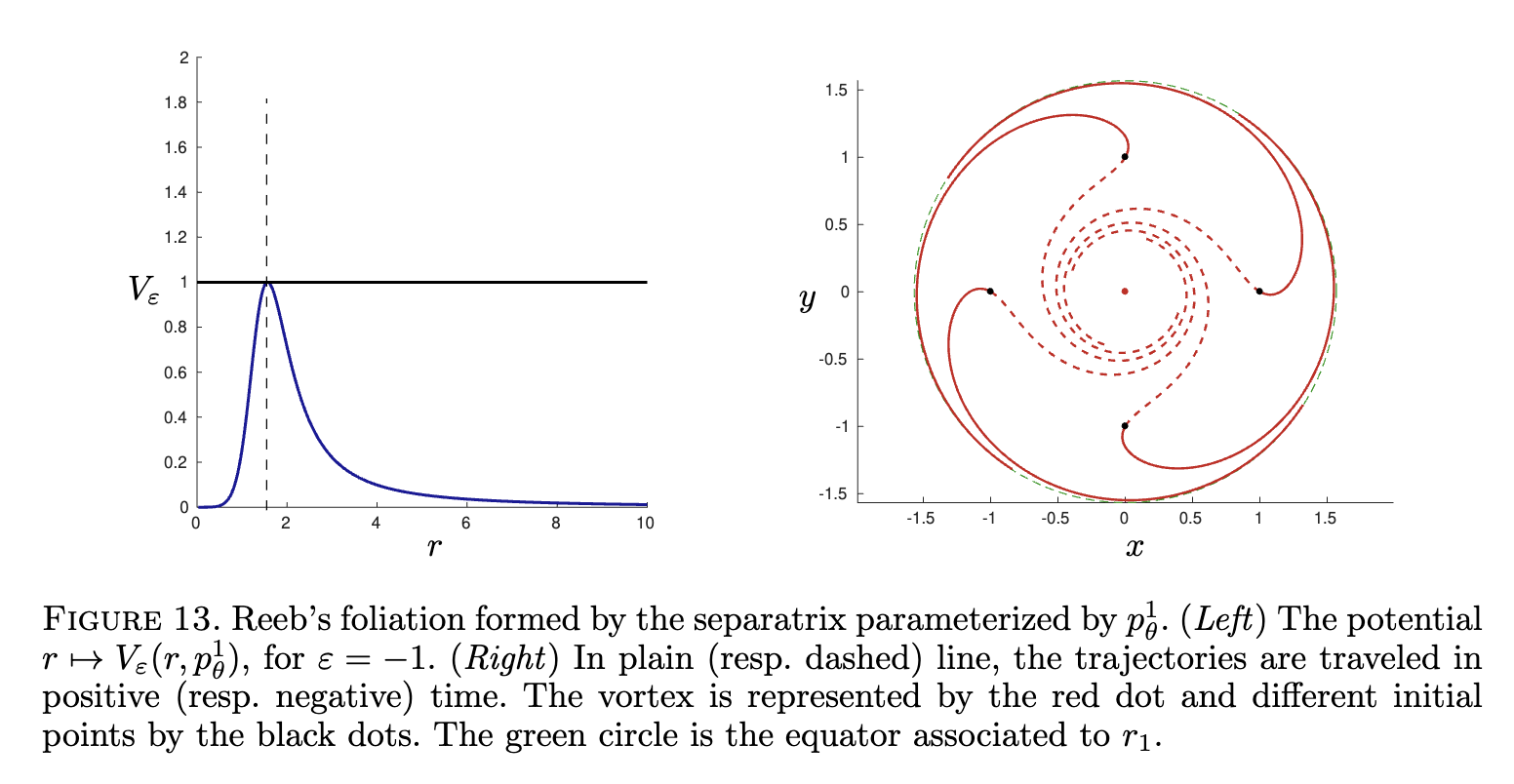

Problème vortex : composantes de Reeb 2/3
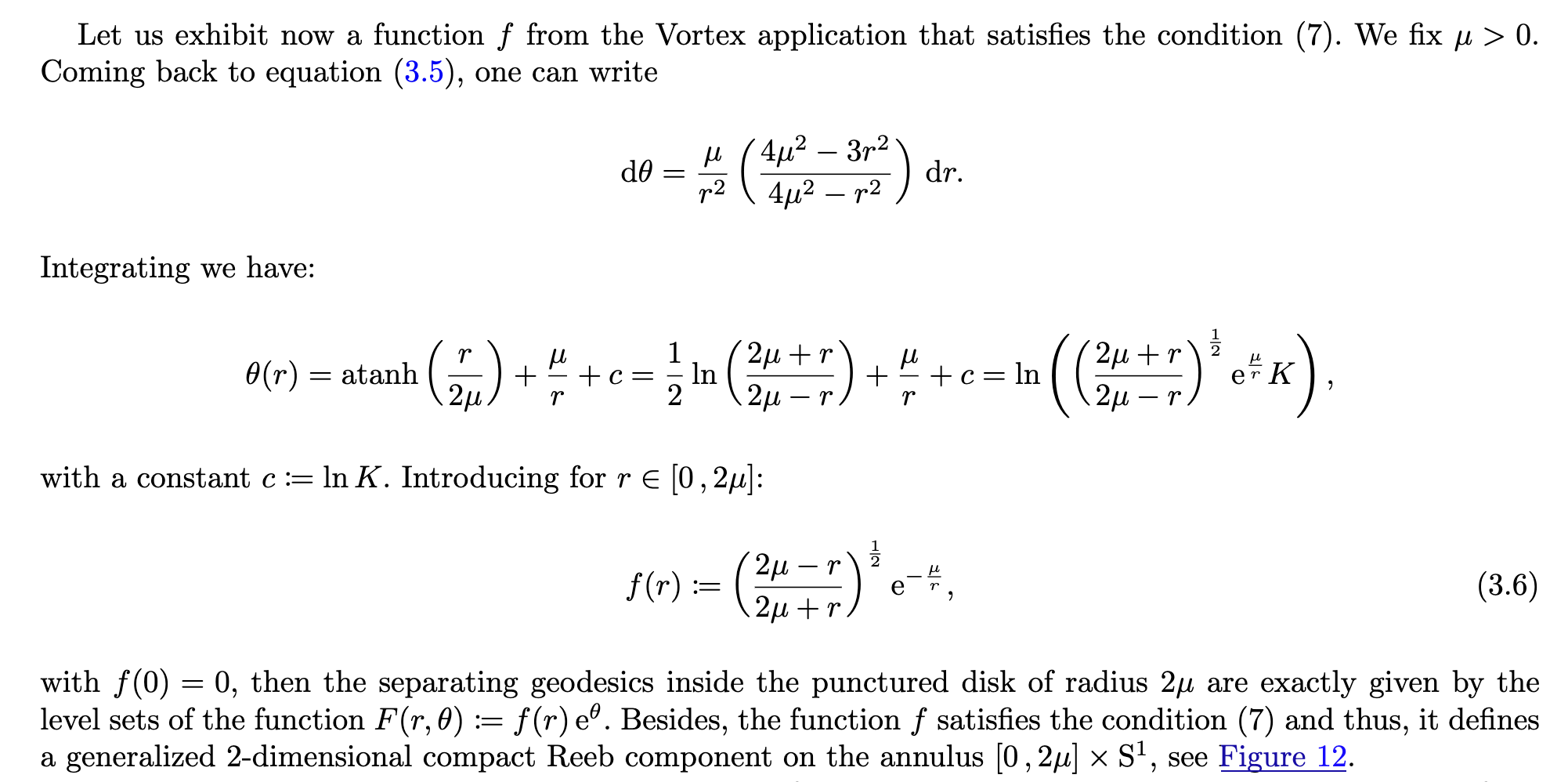
Problème vortex : composantes de Reeb 3/3
Problème en micromagnétisme : référence
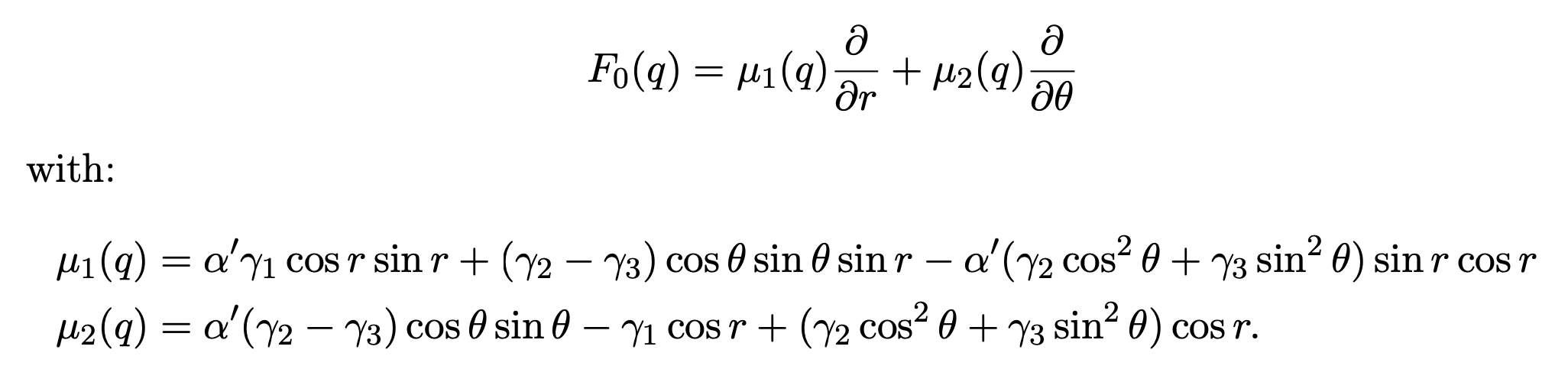
Problème en micromagnétisme : exemple dans le cas Finsler
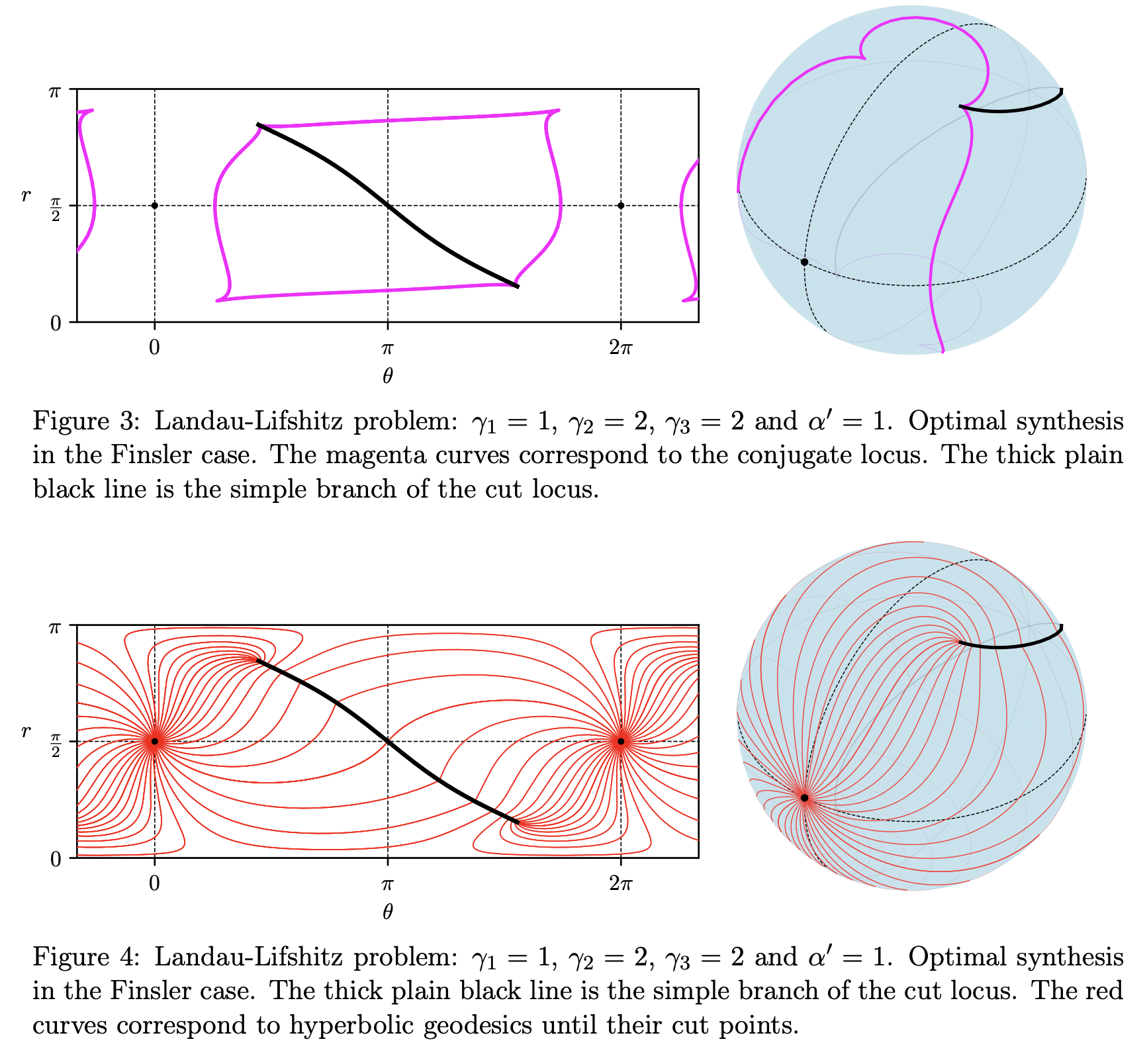
Problème en micromagnétisme : lieu de transition
![]()
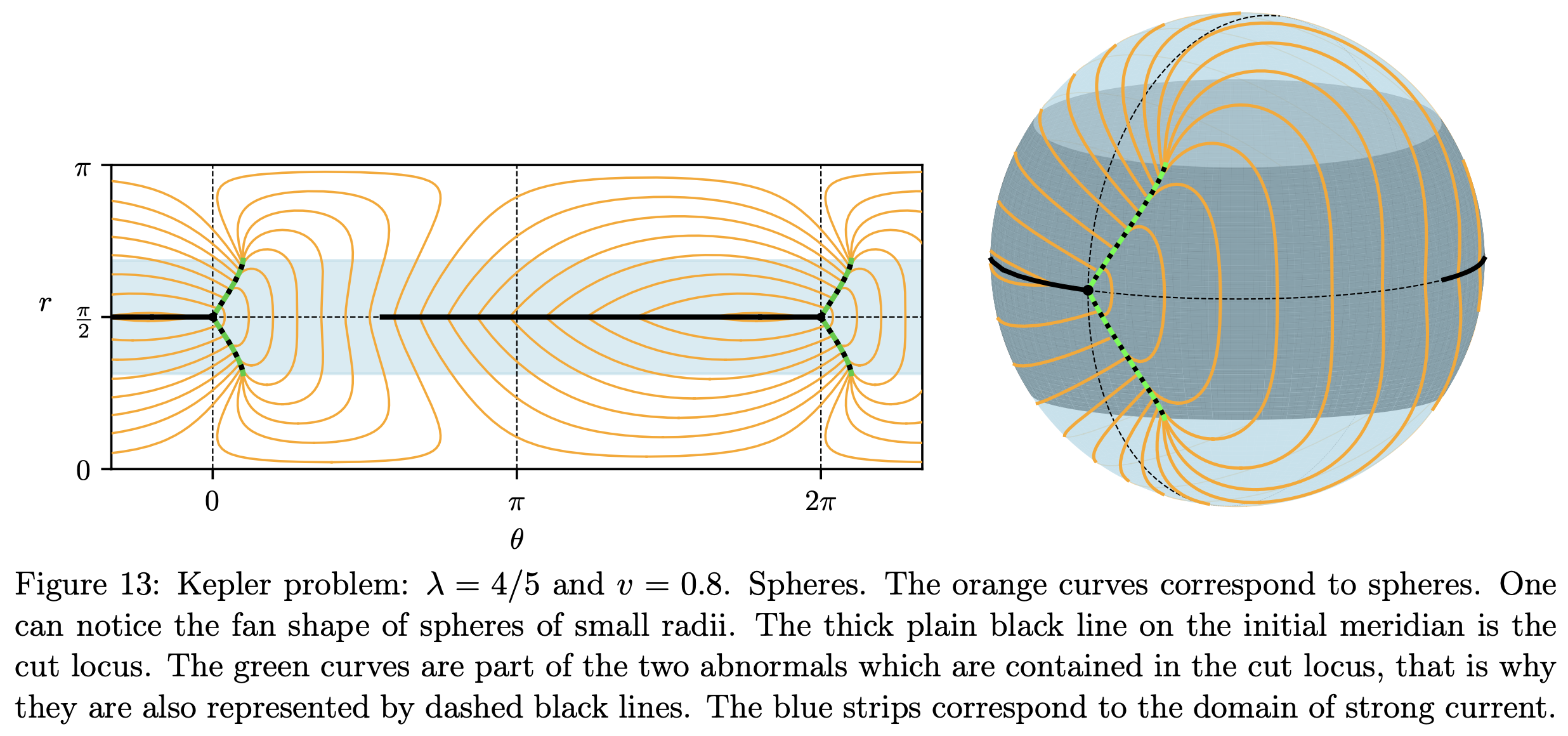
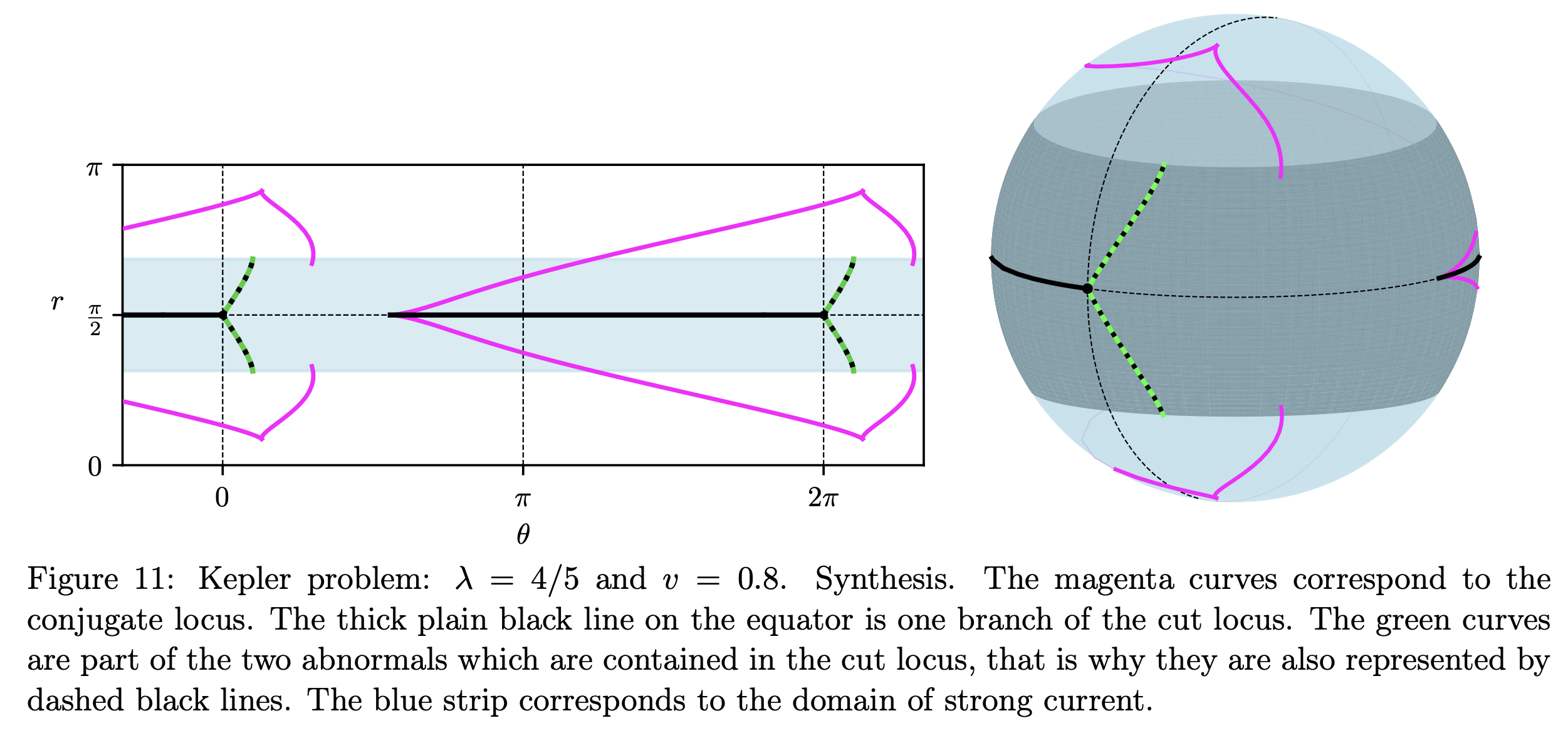
Problème de Kepler moyenné : référence
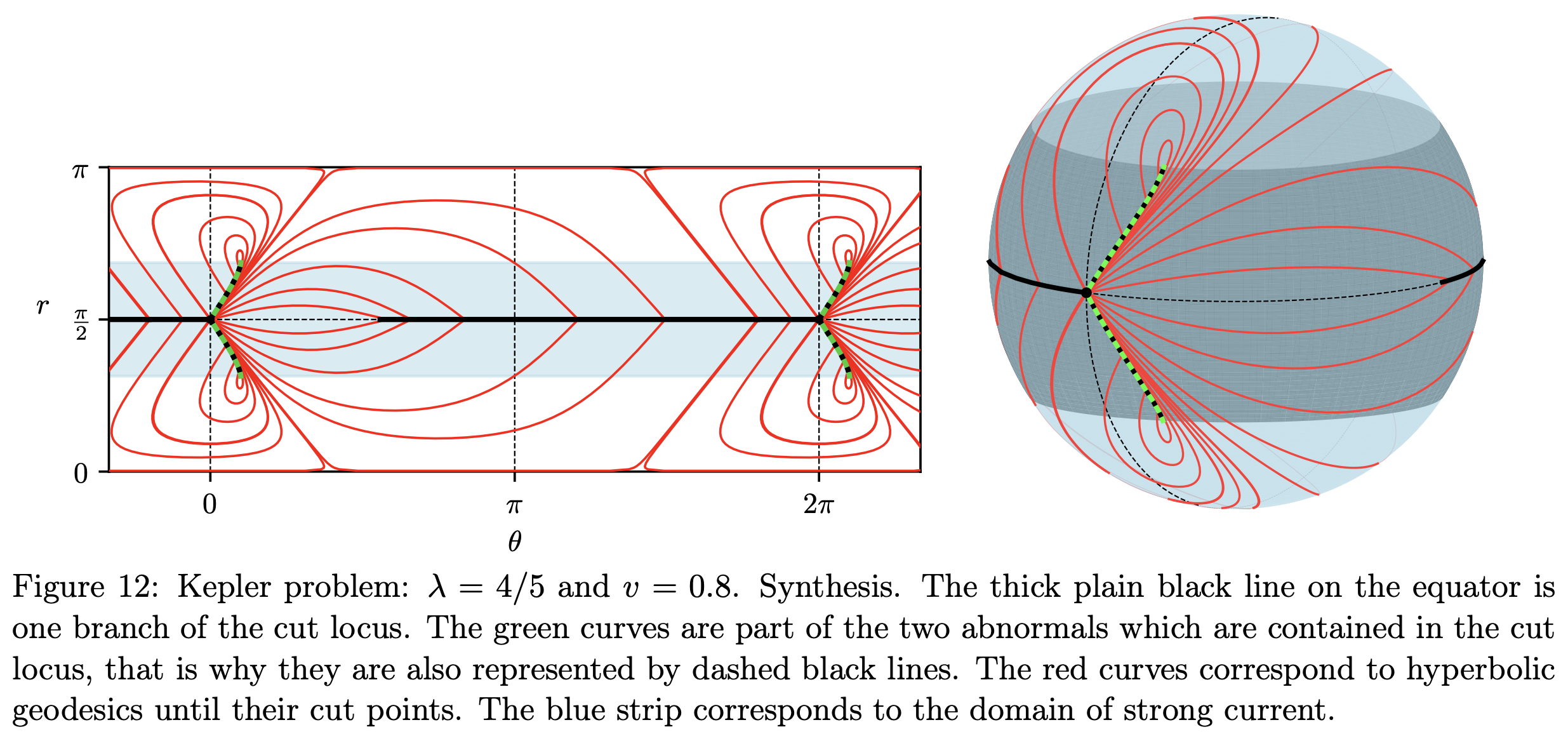
Problème de Kepler moyenné : synthèse
Problème de Kepler moyenné : trajectoires
Problème de Kepler moyenné : sphères